
제로베이스 친절한 일반물리학 2 전자기편
109,000원
온라인 강좌 길이 약 12시간
난이도 초급
수강 기간 100일
참고자료 26개
스터디 채팅방

공대조교형 강의 질문답변방
235명의 멤버가 함께하고 있습니다.
강좌를 구매하시면 즉시 채팅방에 초대됩니다.


커리큘럼 총 35강 · 11시간 31분
Chapter1. 강의 들어가기
나는 왜 이 강의를 찍게 되었는가 맛보기
1:40
일반물리 강의를 듣는 방법 맛보기
4:30
Chapter2. 전기장의 성질 이해하기 & 정복하기
21-1. 쿨롱의 법칙 이해하기 맛보기
17:29
21-2. 쿨롱의 법칙 정복하기
18:41
22-1. 전기장 이해하기
22:04
22-2. 전기장 정복하기
25:12
23-1. 가우스 법칙 이해하기
17:46
23-2. 가우스 법칙 정복하기
41:38
24-1. 전기퍼텐셜 이해하기
19:41
24-2. 전기퍼텐셜 정복하기
23:50
25-1. 축전기와 전기용량 이해하기
20:47
25-2. 축전기와 전기용량 정복하기
32:53
26,27-1. 회로이론 이해하기
12:54
26,27-2. 회로이론 정복하기
34:47
26,27-3. 축전기가 포함된 회로 이해하기 (RC회로)
13:12
26,27-4. 축전기가 포함된 회로(RC회로)와 미분방정식 풀이
16:31
Chapter 3. 자기장의 성질 이해하기 & 정복하기
할리데이 일반물리학 28장부터 31장까지의 내용입니다
28-1. 자기장 이해하기 맛보기
32:47
28-2. 자기장 정복하기
20:24
29-1. 전류가 만드는 자기장 정복하기 (비오-사바르 법칙)
20:10
29-2. 전류가 만드는 자기장 정복하기 (앙페르법칙)
13:56
29-3. 전류가 만드는 자기장 적용하기
15:10
30-1. 전자기 유도와 유도 기전력 이해하기 - 렌츠의 법칙과 패러데이의 법칙
20:42
30-2. 전자기 유도와 유도 기전력 정복하기 - 렌츠의 법칙과 패러데이의 법칙
13:54
30-3. 유도기와 유도용량 이해하기 - 자체유도와 상호유도
18:20
30-4. 회로 내에서의 유도기 이해하기
10:22
30-5. 회로 내에서의 유도기 정복하기
18:10
31-1. 전자기적 진동과 교류 이해하기
32:13
31-2. 전자기적 진동과 교류 정복하기
21:58
Chapter 4. Maxwell 방정식 이해하기 & 정복하기
32-1. Maxwell방정식 이해하기 - 1번 전기장 가우스의 법칙 맛보기
16:10
32-2. Maxwell방정식 이해하기 - 2번 자기장 가우스의 법칙
14:15
32-3. Maxwell방정식 이해하기 - 3번 페러데이의 전자기유도 법칙
20:37
32-4. Maxwell방정식 이해하기 - 4번 앙페르의 법칙
22:09
32-5. Maxwell방정식 정복하기 - 1,2번 가우스의 법칙
22:31
32-6. Maxwell방정식 정복하기 - 3번 패러데이의 법칙
15:17
32-7. Maxwell방정식 정복하기 - 4번 앙페르의 법칙
18:37
참고자료총 26개
멘토 소개

로봇공학자 이충인
로봇의 산업적 기술적 가능성을 연구합니다.
현) kaist 기계공학과 박사과정
전) 네이버랩스제어/EE 엔지니어 (4년)
전) 서울대 전기정보공학부 석사(전력전자, 모터제어)
*수행 프로젝트
세계최초 5G 제어 로봇 엠비덱스 2019년 CES 전시 (with 퀄컴)
네이버랩스 카페 배달로봇 EtherCAT 기반 모터 제어기 개발
MIT 개발 미니치타 4족 보행로봇 양산참여
양방향 힘 전달 원격 조종 햅틱 디바이스개발 참여
사족보행 로봇 효율 극대화를 위한 학습기반 보행 연구
전) 네이버랩스제어/EE 엔지니어 (4년)
전) 서울대 전기정보공학부 석사(전력전자, 모터제어)
*수행 프로젝트
세계최초 5G 제어 로봇 엠비덱스 2019년 CES 전시 (with 퀄컴)
네이버랩스 카페 배달로봇 EtherCAT 기반 모터 제어기 개발
MIT 개발 미니치타 4족 보행로봇 양산참여
양방향 힘 전달 원격 조종 햅틱 디바이스개발 참여
사족보행 로봇 효율 극대화를 위한 학습기반 보행 연구
로봇공학자 이충인의 다른 온라인 강좌는 어떠세요?


수강평 (24)
5점20
4점2
3점2
2점0
1점0

김동휘6년 전
완강했습니다

:P6년 전 수정
대부분의 내용을 수강했습니다
재대후 일학년떄 개념들이 가물가물해서 좋은 강의를 찾다가 결국 선택하게된 강의인데 너무너무 좋았습니다! 이 강의듣고 개념정리를 노트 한권으로 끝내버렸어요~ 강의 특성상 문제풀이보다는 개념에 집중되어있서 문제풀이를 원하시는 분들은 다시한번 고민해 보세요!
조교님 답변의 답변
가벼운 예제 두 문제정도 있으면 개념정리, 문제풀이가 한방에 해결 되는 최고의 강의가 될 것 같습니다ㅎ
쪽지 세번 드렸는데 답장이 없으셔서 수강평 다시 남깁니다!
조교님 답변의 답변
가벼운 예제 두 문제정도 있으면 개념정리, 문제풀이가 한방에 해결 되는 최고의 강의가 될 것 같습니다ㅎ
쪽지 세번 드렸는데 답장이 없으셔서 수강평 다시 남깁니다!
6년 전 수정
문제풀이 강의를 같이 준비해 드리면 더 도움이 많이 되겠죠?? 쪽지 주세요! 수강평 작성 후 원하시는 강의에 적어서 쪽지 주시면 20% 할인 쿠폰 드리는 이벤트 진행중입니다!

박도영6년 전
꾸준히 수강 중입니다
필요한 내용을 골라서 바로바로 들을수 있어 좋았습니다!
6년 전
수강평 감사합니다! 쪽지로 혹시 또 다른 강의들어보고싶은거 있으시면 쪽지 주세요. 수강평 남기신 분들에게 20% 쿠폰이벤트 중입니다.

이효빈6년 전
완강했습니다
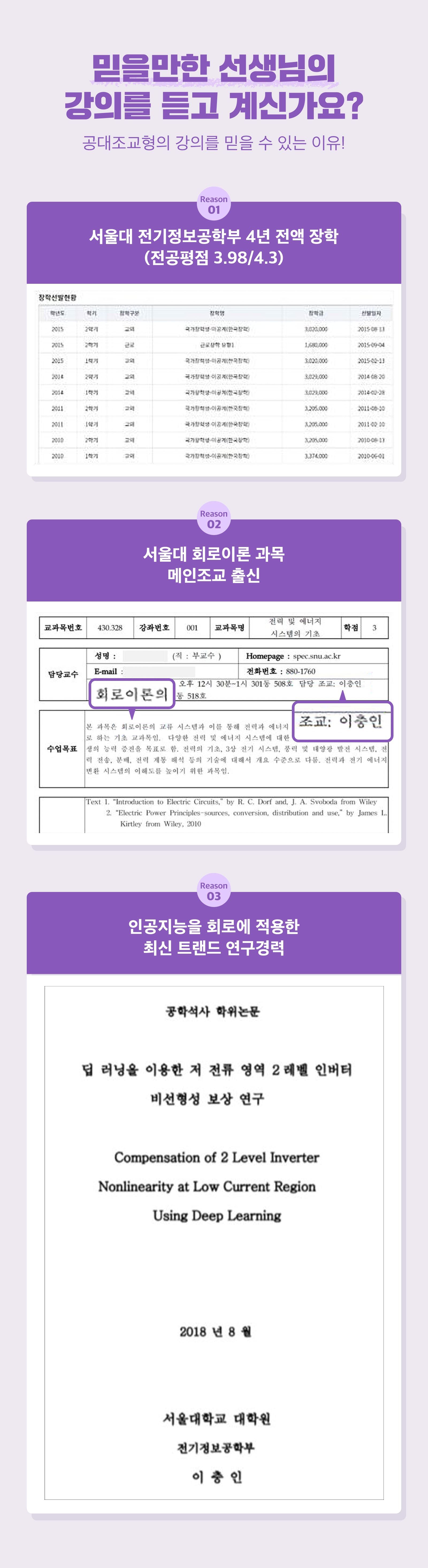
화공과 졸업하고 배터리 관련 대학원 가기 위해 전자기학을 알면 좋겠다 생각해서 수강했는데
정말 좋은 선택이었습니다.
강의 좋았고 유튜브 영상도 챙겨 보고 있습니다~~
정말 좋은 선택이었습니다.
강의 좋았고 유튜브 영상도 챙겨 보고 있습니다~~

bisuplasma6년 전 수정
완강했습니다
물리학2를 전반적으로 중요한 내용을 빠르게 공부 할 수 있어서 좋았습니다.

김강민6년 전
완강했습니다
노베이스인 저도 이해하기 쉽고 좋았습니다

사파이5년 전
완강했습니다
식으로만 배우던 전기장 자기장 맥스웰 방정식을 말로 풀어서 설명할 수 있게 된 게 너무 시원해요. 딱 이런 강의를 원했는데 충인쌤이 어떤 강의가 필요한지 정말 잘 아시는 것 같아요. 본인 입으로는 자기 강의 추천하시기 힘드시겠지만 진짜로 자추할만한 강의입니다!! 너무 재미없고 공부할 엄두 안 나던 전자기학이 이렇게 재밌어질 줄 몰랐습니다. 전공에 흥미갖게 도와주셔서 감사합니다!!

김기현5년 전
완강했습니다
편입하고 막막했던 물리에서 조금 알게된거 같아요 다음 회로 이론도 들으려고 합니다 !!
5년 전
쪽지 주세요! 쿠폰 드릴게요~~

chicken5년 전
완강했습니다
회로이론 강의 듣고 다시 전자기학 들었습니다. 맥스웰 파트는 잘 모르겠지만 회로에 있어서는 이제 회로가 뭔지 알게 된 거 같습니다 미리 회로이론 강의를 듣고 와서 그런지는 모르겠지만 가려운 부분을 긁어주셨습니다.
5년 전
만약 지금 다시 회로이론 공부를 하루정도 투자해서 가볍게 들으시면 특히 인덕터 캐패시터 부분에서 크게 깨달음이 있으실거에요 기초를 탄탄하게 잡으신 부분 축하드립니다!

보로루랑5년 전
완강했습니다
군전역하고 복학 전에 수강했는데, 전자기학의 기초적인 물리적 개념을 정리하는데 좋은 강의입니다.
1학년 때 물리2 교수님이 싫어서 수업을 안 들었는데 어쩌다보니 전기과에 가게돼서 걱정이었는데 강의를 들으면서 전자기학에 대한 막연한 불안감이 줄어들고 물리적 큰 틀을 잘 잡은 것 같아서 만족스럽습니다.
개인적으로 아쉬운 점이 있다면,
1. 이미 앞 강의들에서 배운 내용임에도 뒷 강의에서 그 개념을 너무 반복하는 부분이 많아서(특히 맥스웰 단원) 강의를 듣는 집중력이 중간중간 흐려지는 것 같습니다. 이미 배운 내용은 알고 있다고 생각하고 진행하면 좋을 것 같습니다.
2. 문제풀이가 없어서 아쉽습니다. 수학&물리적 개념이 이해가 안 갈 때 간단하게라도 예제를 통해서 문제를 풀면 도움이 되는 경우가 있습니다. 강의자료에 문제를 첨부해서 풀어보면서 개념을 적용하는 부분이 있으면 더 좋을 것 같습니다.
그렇지만 아쉬운 점보다 좋은 점이 훨씬 많은 강의였습니다. 고민하시는 분들께 추천합니다!
1학년 때 물리2 교수님이 싫어서 수업을 안 들었는데 어쩌다보니 전기과에 가게돼서 걱정이었는데 강의를 들으면서 전자기학에 대한 막연한 불안감이 줄어들고 물리적 큰 틀을 잘 잡은 것 같아서 만족스럽습니다.
개인적으로 아쉬운 점이 있다면,
1. 이미 앞 강의들에서 배운 내용임에도 뒷 강의에서 그 개념을 너무 반복하는 부분이 많아서(특히 맥스웰 단원) 강의를 듣는 집중력이 중간중간 흐려지는 것 같습니다. 이미 배운 내용은 알고 있다고 생각하고 진행하면 좋을 것 같습니다.
2. 문제풀이가 없어서 아쉽습니다. 수학&물리적 개념이 이해가 안 갈 때 간단하게라도 예제를 통해서 문제를 풀면 도움이 되는 경우가 있습니다. 강의자료에 문제를 첨부해서 풀어보면서 개념을 적용하는 부분이 있으면 더 좋을 것 같습니다.
그렇지만 아쉬운 점보다 좋은 점이 훨씬 많은 강의였습니다. 고민하시는 분들께 추천합니다!
5년 전
상세한 피드백 정말 감사드립니다. 제가 일반물리를 배우던 시절 나중에 고학년때 가장 중요한데 1학년때 이해하기 힘들었던 부분이 맥스웰 방정식이었어서 지겹더라도 뇌에 세뇌를 시켜드리고 싶었습니다. 공식은 다 잊으셔도 좋습니다. 그 물리적 감각은 절대 잃지 마세요 그것이 학생분이 전자과라면 정체성을 주는 평생의 자산이 될거에요
김동휘6년 전
완강했습니다
:P6년 전 수정
대부분의 내용을 수강했습니다
재대후 일학년떄 개념들이 가물가물해서 좋은 강의를 찾다가 결국 선택하게된 강의인데 너무너무 좋았습니다! 이 강의듣고 개념정리를 노트 한권으로 끝내버렸어요~ 강의 특성상 문제풀이보다는 개념에 집중되어있서 문제풀이를 원하시는 분들은 다시한번 고민해 보세요!
조교님 답변의 답변
가벼운 예제 두 문제정도 있으면 개념정리, 문제풀이가 한방에 해결 되는 최고의 강의가 될 것 같습니다ㅎ
쪽지 세번 드렸는데 답장이 없으셔서 수강평 다시 남깁니다!
조교님 답변의 답변
가벼운 예제 두 문제정도 있으면 개념정리, 문제풀이가 한방에 해결 되는 최고의 강의가 될 것 같습니다ㅎ
쪽지 세번 드렸는데 답장이 없으셔서 수강평 다시 남깁니다!
6년 전 수정
문제풀이 강의를 같이 준비해 드리면 더 도움이 많이 되겠죠?? 쪽지 주세요! 수강평 작성 후 원하시는 강의에 적어서 쪽지 주시면 20% 할인 쿠폰 드리는 이벤트 진행중입니다!
박도영6년 전
꾸준히 수강 중입니다
필요한 내용을 골라서 바로바로 들을수 있어 좋았습니다!
6년 전
수강평 감사합니다! 쪽지로 혹시 또 다른 강의들어보고싶은거 있으시면 쪽지 주세요. 수강평 남기신 분들에게 20% 쿠폰이벤트 중입니다.
이효빈6년 전
완강했습니다
화공과 졸업하고 배터리 관련 대학원 가기 위해 전자기학을 알면 좋겠다 생각해서 수강했는데
정말 좋은 선택이었습니다.
강의 좋았고 유튜브 영상도 챙겨 보고 있습니다~~
정말 좋은 선택이었습니다.
강의 좋았고 유튜브 영상도 챙겨 보고 있습니다~~
bisuplasma6년 전 수정
완강했습니다
물리학2를 전반적으로 중요한 내용을 빠르게 공부 할 수 있어서 좋았습니다.
김강민6년 전
완강했습니다
노베이스인 저도 이해하기 쉽고 좋았습니다
사파이5년 전
완강했습니다
식으로만 배우던 전기장 자기장 맥스웰 방정식을 말로 풀어서 설명할 수 있게 된 게 너무 시원해요. 딱 이런 강의를 원했는데 충인쌤이 어떤 강의가 필요한지 정말 잘 아시는 것 같아요. 본인 입으로는 자기 강의 추천하시기 힘드시겠지만 진짜로 자추할만한 강의입니다!! 너무 재미없고 공부할 엄두 안 나던 전자기학이 이렇게 재밌어질 줄 몰랐습니다. 전공에 흥미갖게 도와주셔서 감사합니다!!
김기현5년 전
완강했습니다
편입하고 막막했던 물리에서 조금 알게된거 같아요 다음 회로 이론도 들으려고 합니다 !!
5년 전
쪽지 주세요! 쿠폰 드릴게요~~
chicken5년 전
완강했습니다
회로이론 강의 듣고 다시 전자기학 들었습니다. 맥스웰 파트는 잘 모르겠지만 회로에 있어서는 이제 회로가 뭔지 알게 된 거 같습니다 미리 회로이론 강의를 듣고 와서 그런지는 모르겠지만 가려운 부분을 긁어주셨습니다.
5년 전
만약 지금 다시 회로이론 공부를 하루정도 투자해서 가볍게 들으시면 특히 인덕터 캐패시터 부분에서 크게 깨달음이 있으실거에요 기초를 탄탄하게 잡으신 부분 축하드립니다!
보로루랑5년 전
완강했습니다
군전역하고 복학 전에 수강했는데, 전자기학의 기초적인 물리적 개념을 정리하는데 좋은 강의입니다.
1학년 때 물리2 교수님이 싫어서 수업을 안 들었는데 어쩌다보니 전기과에 가게돼서 걱정이었는데 강의를 들으면서 전자기학에 대한 막연한 불안감이 줄어들고 물리적 큰 틀을 잘 잡은 것 같아서 만족스럽습니다.
개인적으로 아쉬운 점이 있다면,
1. 이미 앞 강의들에서 배운 내용임에도 뒷 강의에서 그 개념을 너무 반복하는 부분이 많아서(특히 맥스웰 단원) 강의를 듣는 집중력이 중간중간 흐려지는 것 같습니다. 이미 배운 내용은 알고 있다고 생각하고 진행하면 좋을 것 같습니다.
2. 문제풀이가 없어서 아쉽습니다. 수학&물리적 개념이 이해가 안 갈 때 간단하게라도 예제를 통해서 문제를 풀면 도움이 되는 경우가 있습니다. 강의자료에 문제를 첨부해서 풀어보면서 개념을 적용하는 부분이 있으면 더 좋을 것 같습니다.
그렇지만 아쉬운 점보다 좋은 점이 훨씬 많은 강의였습니다. 고민하시는 분들께 추천합니다!
1학년 때 물리2 교수님이 싫어서 수업을 안 들었는데 어쩌다보니 전기과에 가게돼서 걱정이었는데 강의를 들으면서 전자기학에 대한 막연한 불안감이 줄어들고 물리적 큰 틀을 잘 잡은 것 같아서 만족스럽습니다.
개인적으로 아쉬운 점이 있다면,
1. 이미 앞 강의들에서 배운 내용임에도 뒷 강의에서 그 개념을 너무 반복하는 부분이 많아서(특히 맥스웰 단원) 강의를 듣는 집중력이 중간중간 흐려지는 것 같습니다. 이미 배운 내용은 알고 있다고 생각하고 진행하면 좋을 것 같습니다.
2. 문제풀이가 없어서 아쉽습니다. 수학&물리적 개념이 이해가 안 갈 때 간단하게라도 예제를 통해서 문제를 풀면 도움이 되는 경우가 있습니다. 강의자료에 문제를 첨부해서 풀어보면서 개념을 적용하는 부분이 있으면 더 좋을 것 같습니다.
그렇지만 아쉬운 점보다 좋은 점이 훨씬 많은 강의였습니다. 고민하시는 분들께 추천합니다!
5년 전
상세한 피드백 정말 감사드립니다. 제가 일반물리를 배우던 시절 나중에 고학년때 가장 중요한데 1학년때 이해하기 힘들었던 부분이 맥스웰 방정식이었어서 지겹더라도 뇌에 세뇌를 시켜드리고 싶었습니다. 공식은 다 잊으셔도 좋습니다. 그 물리적 감각은 절대 잃지 마세요 그것이 학생분이 전자과라면 정체성을 주는 평생의 자산이 될거에요